Digital IO 사용 가이드
- service1299
- 4월 1일
- 1분 분량
개요
컨트롤러와 엔드 이펙터에는 서로 다른 IO가 있습니다.
컨트롤러: 디지털 입력 8/16개, 디지털 출력 8/16개, 아날로그 입력 2개, 아날로그 출력 2개
엔드 이펙터: 디지털 입력 2/5개, 디지털 출력 2/5개, 아날로그 입력 2개
1. 컨트롤러 IO (xArm1300 / 850 / Lite6)
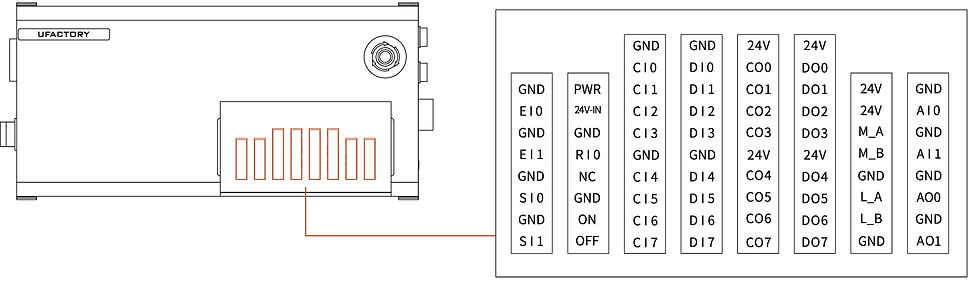
1.1 디지털 입력
CI0 ~ CI7
DI0 ~ DI7
기본값은 High 레벨입니다.0~5V는 Low 레벨, 18~30V는 High 레벨입니다.
1.2 디지털 출력
CO0 ~ CO7
DO0 ~ DO7
이는 OC 출력, NPN 출력이며, 전류는 100mA입니다.

2. 엔드 이펙터 IO
2.1 디지털 입력
TI0
TI1
TI2, TI3, TI4 (UF850)
기본값은 Low 레벨입니다.전압 범위는 0~30V이며, 1.6~30V는 High 레벨입니다.
2.2 디지털 출력
TO0
TO1
TO2, TO3, TO4 (UF850)
이는 OC 출력, NPN 출력이며, 전류는 100mA입니다.
3. 적용 예시
목적
PMOS 모듈을 추가하여 출력 전류를 증폭합니다.(COx / DOx에도 동일하게 적용 가능)
적용 분야
릴레이 구동
입력 사양
전압: 3~24V
전류: 5mA
출력 사양
전압: 5~36V
전류: 5A, 5A를 초과하는 경우 방열판을 추가해야 하며, 20A를 초과할 수 없습니다.

연결 방식
Signal V+ → 24V
Signal V- → TOX
DC → 24V
DC → GND
load V+ → OUT+
load V- → OUT-
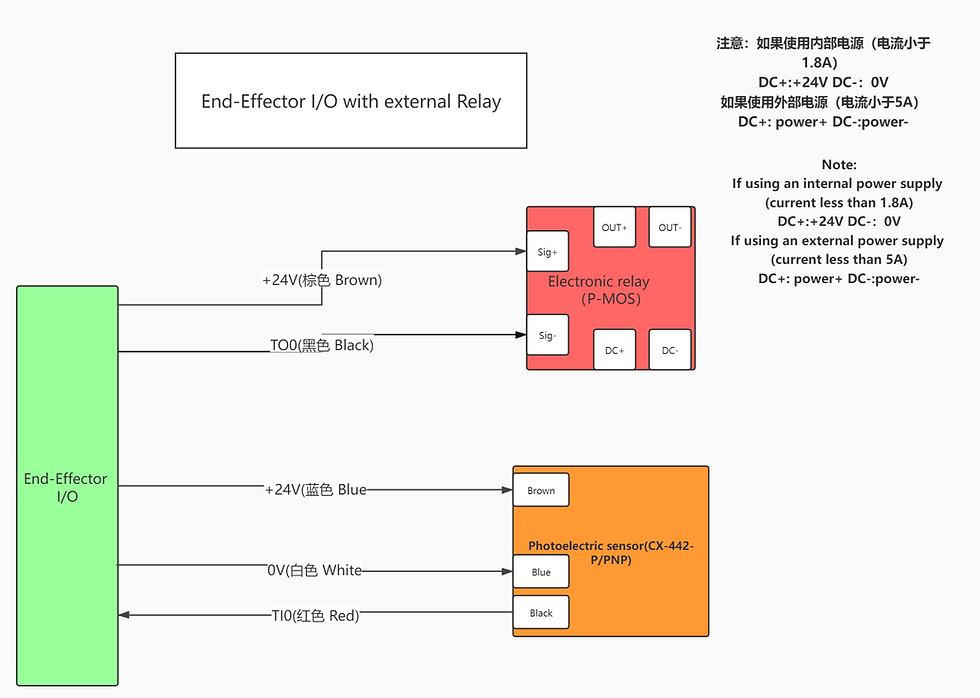
주의사항
컨트롤러 IO와 엔드 이펙터 IO는 사양이 서로 다릅니다.
디지털 입력의 기본 레벨과 전압 기준을 구분해서 사용해야 합니다.
디지털 출력은 OC 출력, NPN 출력이며 출력 전류는 100mA입니다.
PMOS 모듈 사용 시 출력 전류가 5A를 초과하면 방열판을 추가해야 하며, 최대 20A를 초과할 수 없습니다.

