관절 서보 영점을 재설정하는 방법
- service1299
- 4월 1일
- 2분 분량
개요
적용 제품: XF1304, XI1304, XS1304, UF 850
UFactory Studio: 2.4.0+
관절 서보 영점을 재설정하기 전에는 반드시 technical support(service@flosys.kr) 에 먼저 확인을 받아야 합니다.사전 확인 없이 재설정할 경우 보증에 영향을 줄 수 있습니다.
준비
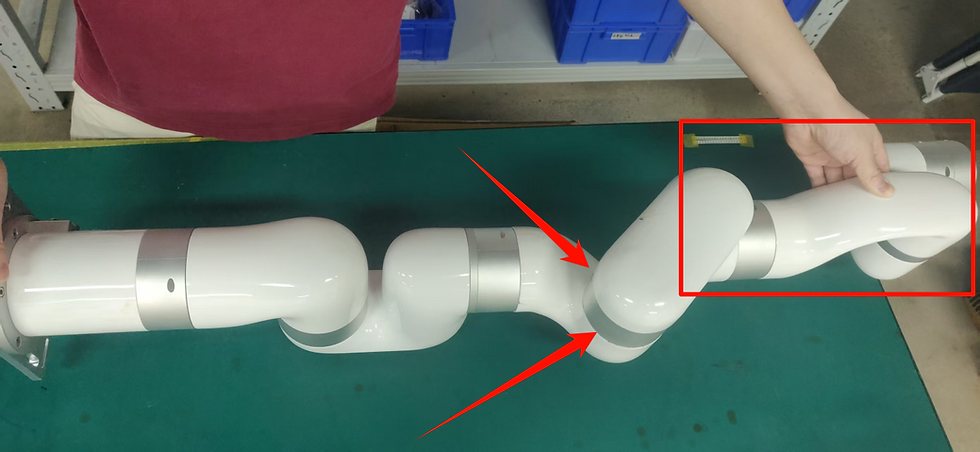
Joint3 - xArm5 / xArm6
모든 엔드 이펙터를 제거하고, TCP payload를 0 으로 설정합니다.
아래 이미지와 같이 암을 테이블 위에 수평으로 놓습니다.
J3는 약 -175도
J4, J5, J6가 떠 있는 상태가 되도록 합니다.
로봇 암이 움직이지 않도록 1명이 암을 잡고 있어야 합니다.

Joint4 - UF850
모든 엔드 이펙터를 제거하고, TCP payload를 0 으로 설정합니다.
암을 영점 위치로 다시 이동합니다.
Joint4 - xArm7
모든 엔드 이펙터를 제거하고, TCP payload를 0 으로 설정합니다.
아래 이미지와 같이 암을 테이블 위에 수평으로 놓습니다.
J4는 약 175도
J5, J6, J7이 떠 있는 상태가 되도록 합니다.
로봇 암이 움직이지 않도록 1명이 암을 잡고 있어야 합니다.
재설정 명령
비상정지(E-stop) 버튼을 눌렀다가 해제합니다.
로봇을 Enable하지 않은 상태에서,
Settings → General → Debugging Tools → Joint 경로를 통해 servo reset command 를 전송합니다.
명령어는 service@flosys.kr 에 문의하여 받아야 합니다.
이때 J* 가 약간 움직이고, "click" 과 같은 소리가 들린 뒤 더 이상 움직이지 않으면 재설정 과정이 끝난 것입니다.
2번 단계를 반복하여 서보 영점 재설정을 완료합니다.
전체 시스템을 재부팅한 뒤, 로봇을 Enable합니다.
Settings → General → Debugging Tools → Joint 에서 Joint * 를 Unlock합니다.
joint* 를 원래의 영점 위치로 이동합니다.
D13 I* 를 전송합니다.
비상정지(E-stop) 버튼을 눌렀다가 해제하여 적용합니다.
그러면 현재 Joint* 의 위치가 0° 로 설정됩니다.
주의사항
서보 영점 재설정 전에는 반드시 technical support 에 사전 확인을 받아야 합니다.
사전 확인 없이 재설정을 진행하면 보증에 영향을 줄 수 있습니다.
엔드 이펙터는 모두 제거해야 하며, TCP payload는 0 으로 설정해야 합니다.
재설정 과정 중에는 대상 관절이 약간 움직일 수 있으므로, 준비 단계에서 안내한 자세와 고정 조건을 반드시 지켜야 합니다.