관절 서보 영점이 유실되었는지 판단하는 방법
- service1299
- 4월 1일
- 1분 분량
개요
xArm6를 예로 들어 설명합니다.
적용 제품: XF1304, XI1304, XS1304, UF 850
UFactory Studio: 2.4.0+
적용 상황
TCP payload가 올바르게 설정되어 있고, 충돌 감지 민감도가 ≤3 임에도 불구하고 소프트웨어에서 계속 C31 또는 S15 오류를 보고하는 경우, 서보 영점이 유실되었을 가능성이 있습니다.
2024년 7월 이후에 구매한 장비의 경우, UFACTORY에서 원래의 관절 서보 영점 데이터를 백업해두고 있습니다. 아래 툴을 사용해 데이터를 추출한 뒤 CSV 파일을 전달하면, 내부적으로 비교를 진행할 수 있습니다.그 이전 구매 장비의 경우에는 아래 단계에 따라 해당 관절의 전류를 확인해야 합니다.
1. CSV 파일 얻기
로봇 암을 영점 위치 [0,0,0,0,0,0] 로 이동합니다.
E_read_mmu.exe 를 다운로드하고 실행합니다.
Windows 시스템 전용
컨트롤러의 IP를 입력하고 Enter를 누릅니다.
2~3분 정도 기다리면 CSV 파일이 자동으로 생성됩니다.

2. 전류 그래프 얻기
해당 관절의 전류를 확인하려면 아래 단계를 따르십시오.
모든 엔드 이펙터를 제거하고, TCP payload와 offset을 0 으로 설정합니다.
Settings → General → Advanced Settings → Collision Detection 을 비활성화합니다.
로봇 암을 영점 위치 [0,0,0,0,0,0] 로 이동합니다.
UFactory Assist(Windows 버전) 와 Blockly 프로젝트(J3를 -90°로 이동)를 다운로드합니다.
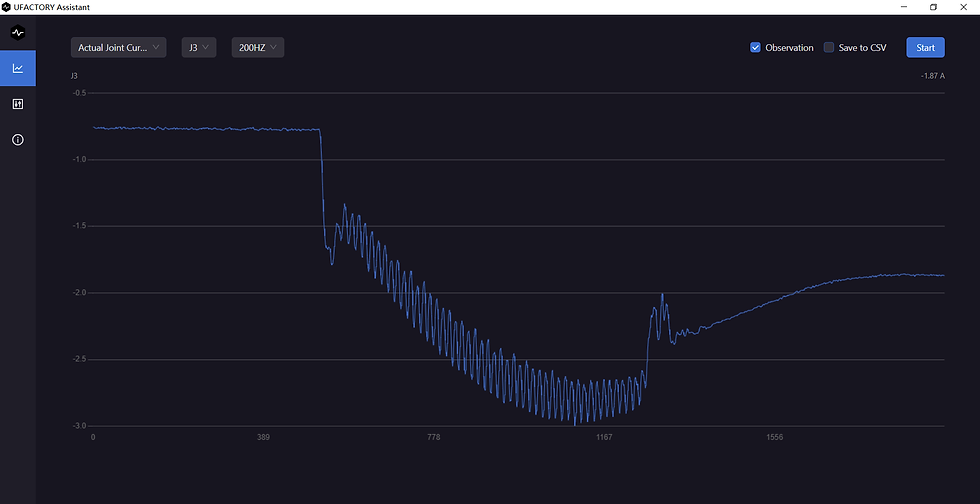
UFactory Assist를 실행하고, Actual Joint Current, J3, 200HZ 를 선택한 뒤 observation 과 Start 를 클릭합니다.
Blockly 프로젝트를 실행합니다.
UFactory Assist에서 End 버튼을 클릭한 뒤, 전류 그래프를 캡처합니다.
전류는 약 2A 정도여야 합니다.
확인을 위해 스크린샷을 service@flosys.kr 로 보내십시오.

참고사항
TCP payload가 정확하고 충돌 감지 민감도가 3 이하인데도 C31 또는 S15 오류가 계속 발생하면, 서보 영점 유실 가능성을 의심할 수 있습니다.
2024년 7월 이후 구매 장비는 원래의 관절 서보 영점 데이터를 백업해두었으므로, CSV 파일을 전달하면 내부 비교가 가능합니다.
그 이전 구매 장비는 현재 관절 전류를 측정해 확인해야 합니다.